
Software
Ruskin – a single piece of software to do it all.
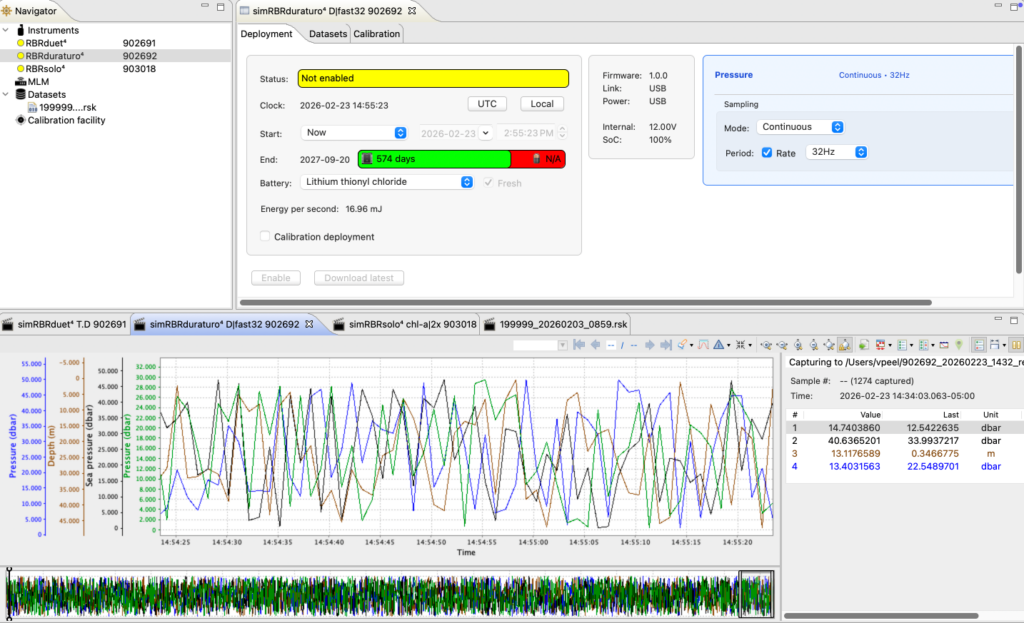
All RBR instruments use a single piece of software: Ruskin. Compatible with PCs and Macs, it is easy to install, simple to use, and handles deployment, download, and data display in one place.
Even if you do not have an RBR instrument yet, you can simulate deployments and estimate battery autonomy and memory usage for different scenarios.
Ruskin Features
- Multiple instrument interface: More than one logger can be connected to Ruskin and multiple datasets can be opened at the same time.
- Multi-language capability: English, French, Spanish, Japanese, Chinese, and Korean.
- Flexible export: In addition to the raw RSK data file (.rsk), Ruskin supports the following formats: OceanDataView (.odv) and Excel (.xlsx), as well as a plain ASCII (.txt) format.
- Plotting: When you want to check that the deployment worked out, Ruskin gives you a set of charting tools to help you visualize your data.
- Cast support: Use instrument-generated or post-processing-generated casts to segment your data and view as either time-based or depth-based plots.
- Plot output: Ruskin saves plots in PNG (bitmap) and PDF (vector) formats with a click of a button.
- Complete deployment simulation: If you are curious about battery autonomy or memory usage estimates, Ruskin can simulate any RBR instrument and estimate the deployment resources required.
- User calibration: One- or two-point calibration for dissolved oxygen, pH, fluorescence, and turbidity.
- Automatic update: You don’t need to check to see if we have added new features – Ruskin will check for you. Each time you start Ruskin, it will inform you of any improved version available and ask if you want to download it for free.
- Comments: It’s easy to send feedback! From the Help>Comment on Ruskin menu, you can tell us about features you think we should add, or bugs you’ve found.
Serial-to-USB (dongle/driver) issues
We recommend the ES-U-1001-A dongle using the FTDI driver. We have found that many other adapters using other chipsets do not work satisfactorily. Remember to install the driver; otherwise, the COM port will not be visible to Ruskin.
Documentation
Ruskin User Guide: Compact Instruments⁴Ruskin User Guide: Compact Instruments³Ruskin User Guide: RBRduraturo⁴Ruskin User Guide: Standard Instruments³Ruskin User Guide: Sensors³RBR Datasheet: Ruskin SoftwareRuskin release notesSee also
Popular Models

Mobile Software
Learn More about Mobile Software
We partner with passionate oceanography and water quality experts worldwide to ensure you receive excellent local customer service, sales, and support.